ドールと京商「ターボスコーピオン」 (組立編5)

続きを始めます。

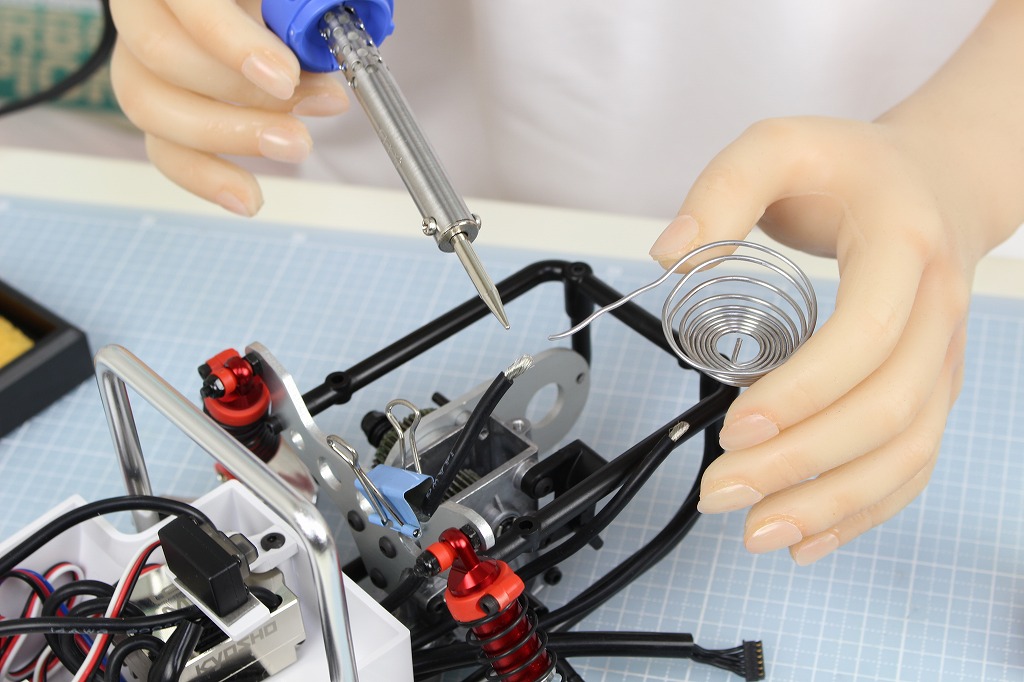
いよいよ、はんだ付けです。

開封しました。必要なものは一通りそろっています。

まずは、ケーブルをお好みの長さにカットし、チューブを剥き、芯を出します。

こんな感じです。ケーブルには「A」「B」「C」の区別があるので、間違わないよう注意が必要です。

そして、モーターを一旦外します。

はんだごてが温まりました。とりあえず、「A」のケーブルをはんだ付けしてみたいと思います。
まずは、ケーブルの芯にはんだを染み込ませます。

こんな感じです。

次に、モーターの「A」の端子にはんだを盛ります。

こんな感じです。

あとは、芯と端子のはんだを溶かしながらくっ付け、さらにはんだを盛ります。

できました。ちょっと斜めになってしまいましたが、しっかり付いています。

同様に、「B」と「C」のケーブルもはんだ付けします。

はんだごての熱は、ドールにとって天敵です。人間ならやけど程度で済みますが、ドールだとシリコンが溶け、一生消えないキズが残ります。
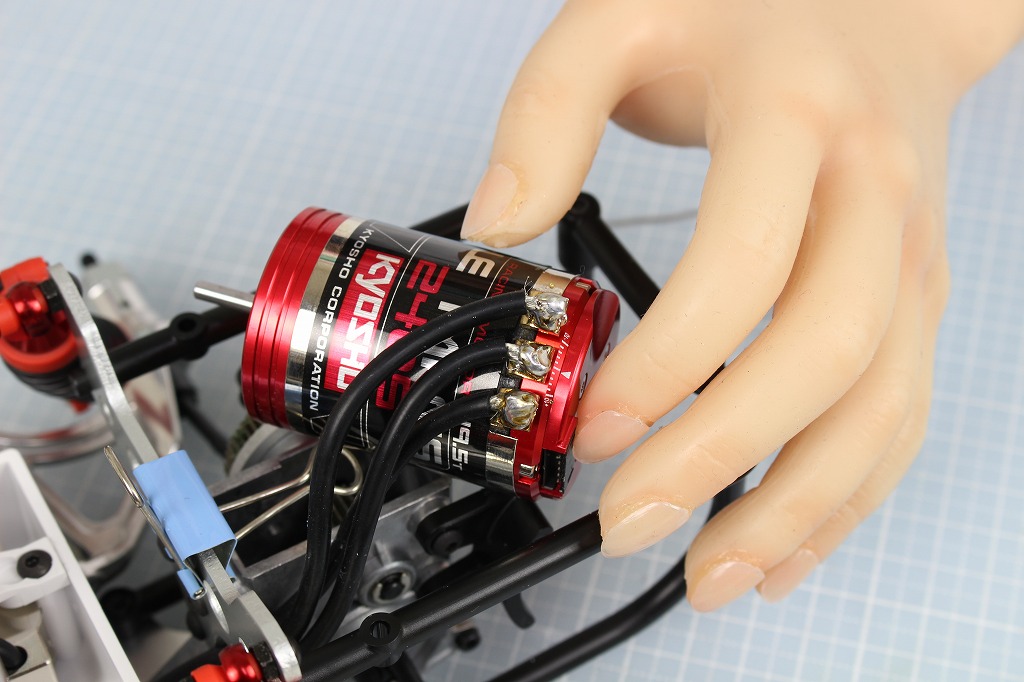
完成です。見た目は悪いですが、しっかり付いています。「A」にも、もう少しはんだを盛りました。
モーターを戻します。当然ですが、これでもうスピードコントローラーとモーターをシャーシから取り外すことはできません。他のRCでも使用する場合、はんだを剥がすか、ケーブルをカットし、間に中継コネクタ等を入れる必要があります。

センサーケーブルを接続し、ケーブルをバンドでまとめました。

バッテリーを接続し動作確認をしましょう。ついでに、サーボのニュートラルも確認します。

よし、バッチリです。とりあえず、はんだ付けは成功です。

ただ、モーターを回すのにコツがいります。受信機を変更したら普通に動いたので、この受信機(RX-481)は京商のスピードコントローラーと相性が悪いのかもしれません。コネクタも削らないと刺さらないし…

どんどん行きましょう。次は…

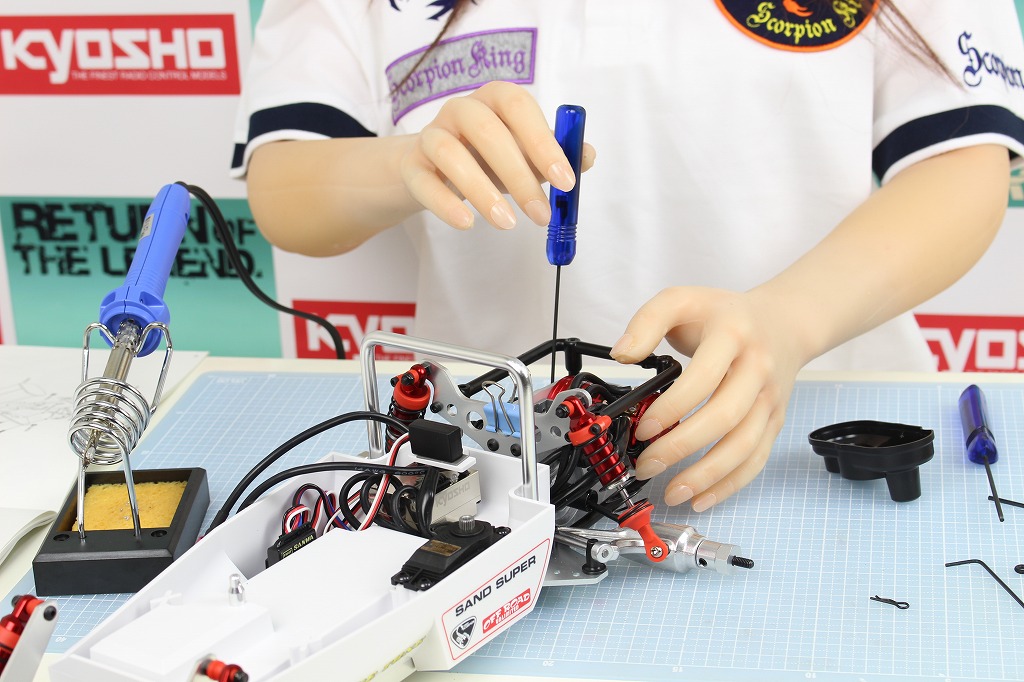
ステアリングロッドを1本作ります。

このロッドでサーボとステアリングアームを接続します。ネジはサーボに付属のものを使います。
これで、内部の組み立ては完了です。

ここから、最後「E」の袋を使います。

中には、ネジやナット、アルミのプレートなどが入っています。

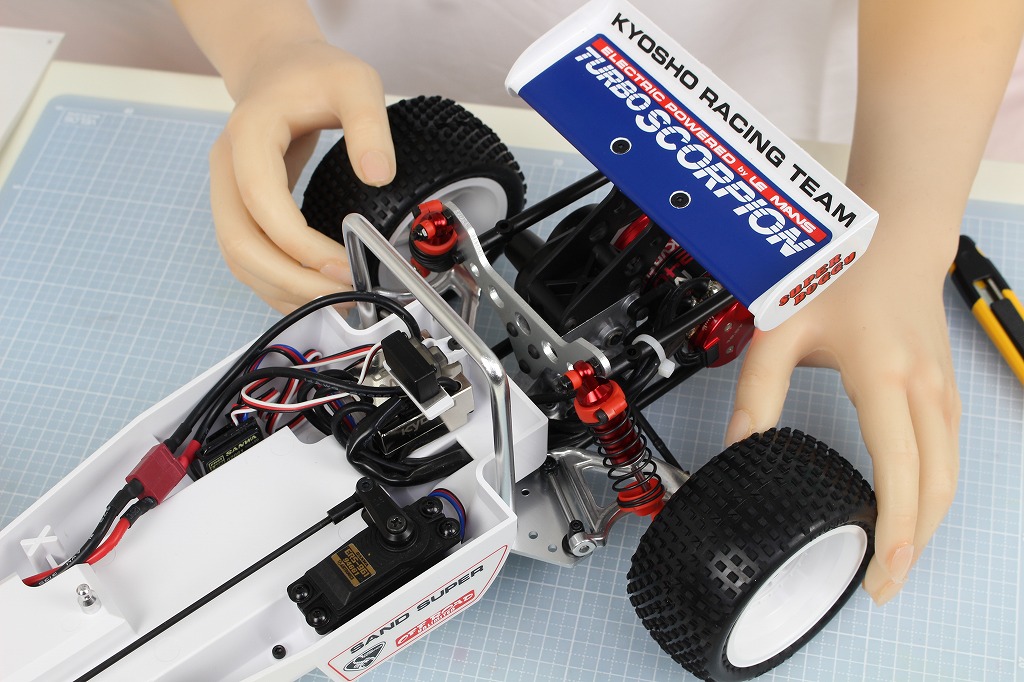
シールを貼ったウイングの登場です。これにパーツを付けて…

リア部に取り付けます。

こんな感じです。ウイングはギヤボックスのカバーも兼ねています。

ここで、ついに「アレ」の登場です。
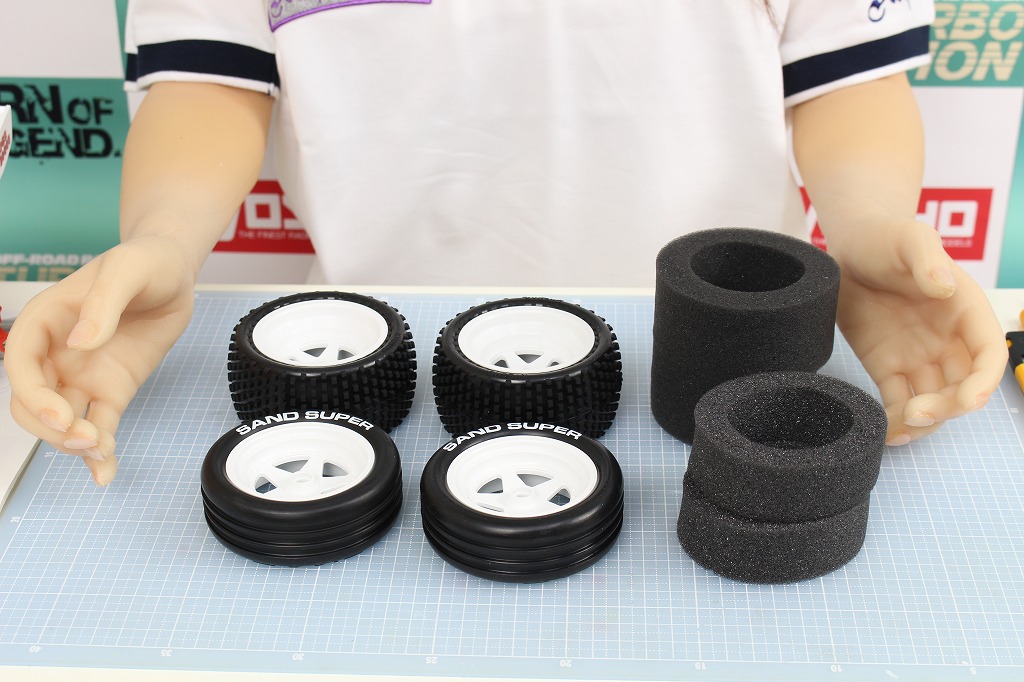
そう、タイヤです!ホイールが組み込まれていますが、インナースポンジを入れるため、一度ばらさなければいけません。

どうせなら、インナースポンジも入れておいてほしかったです。

タイヤの完成です。

前輪を取り付けます。

さらに、後輪も取り付けます。

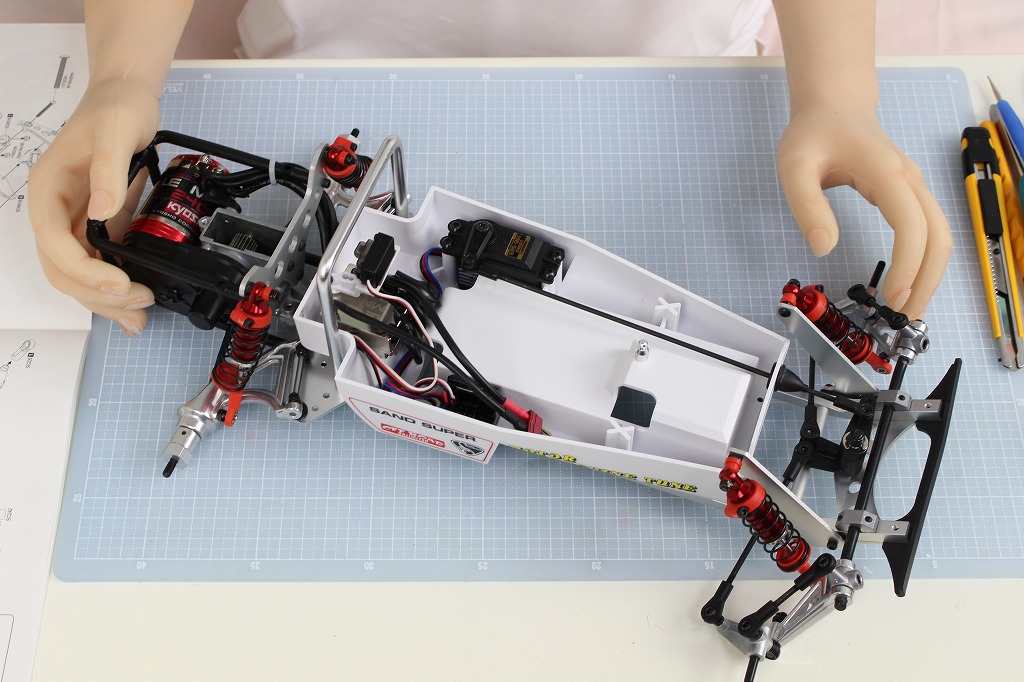
引っくり返し、バッテリーを搭載すれば…

車体の完成です。

スッキリとした見た目です。

フロント部。
リア部。

残りはボディの組み立てです。