ドールとタミヤ「アグリオス」 (組立編5)

続きを始めますが、ここから電動パーツを取り付けるので、プロポの中身を見てみましょう。

開封します。

中はこんな感じです。主な内容品は、プロポと受信機、サーボが2つです。スピードコントローラーは入っていません。アグリオスはモーターを2つ使うので、ツインモーターに対応したスピードコントローラーが必要です。
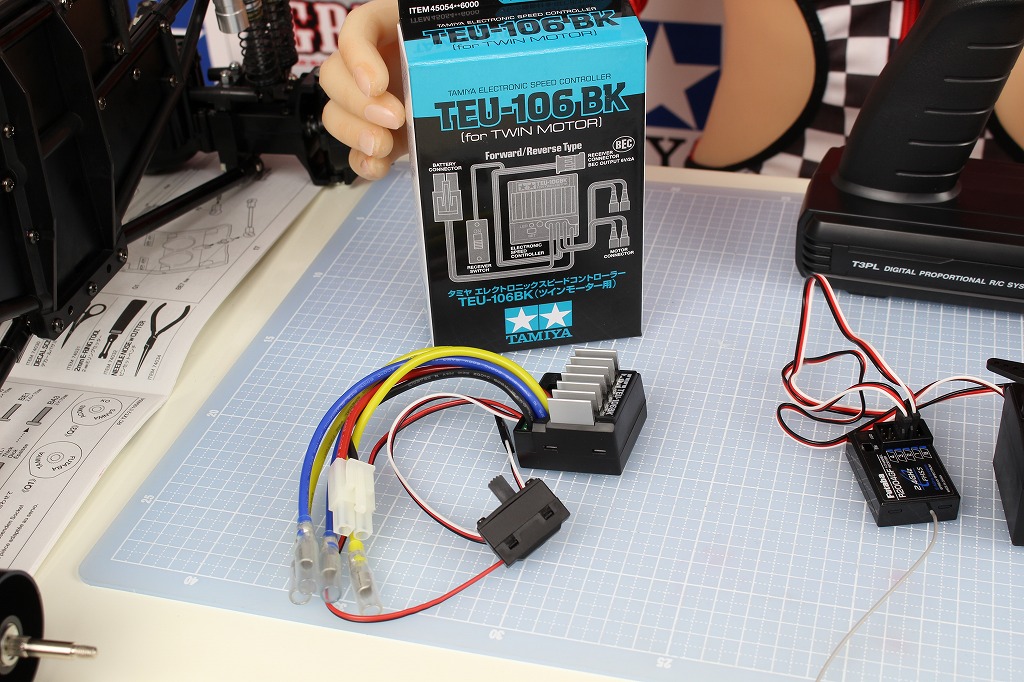
ということで、スピードコントローラーは、タミヤ「TEU-106BK」を別途購入しました。以前組み立てた「スーパークラッドバスター」に付属しているものと同じです。できれば、アグリオスにも付属して欲しかったです。

必要なものを取り出しました。

プロポのステアリングホイルが、タイヤっぽくなっています。両側には液晶パネルとスイッチがあります。詳細は省略します。

電源はサイドにあります。

使用には単三乾電池4本(別売)が必要です。

電動パーツを接続し、サーボのニュートラルを確認します。今回は、4WS(四輪操舵)仕様にするのでサーボを2つ取り付けます。

ちなみに、以前組み立てた「スーパークラッドバスター」は1つのサーボで4WSを行っていましたが、「アグリオス」では2つのサーボで4WSを行います。その為、プロポが2つのサーボを同時に制御する「4WSミキシング」に対応している必要があります。
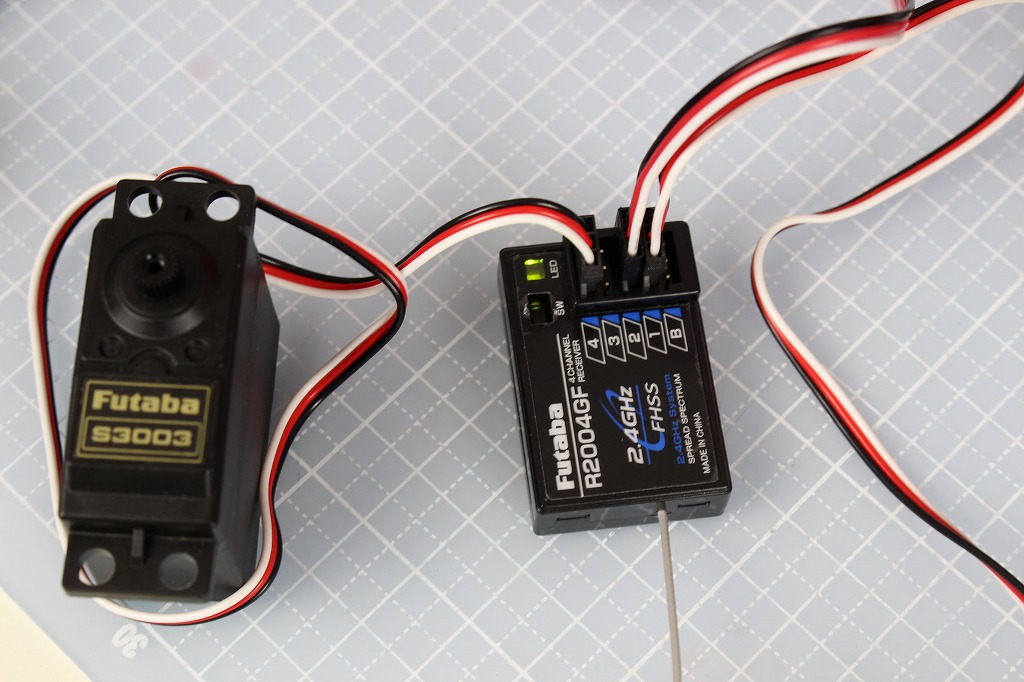
この受信機(R2004GF)の場合、「1」に前輪のステアリングサーボを、「4」に後輪のステアリングサーボを接続することで4WSが可能になります。ただし、サーボの取り付け方によっては、どちらかのサーボをリバースに設定する必要があります。
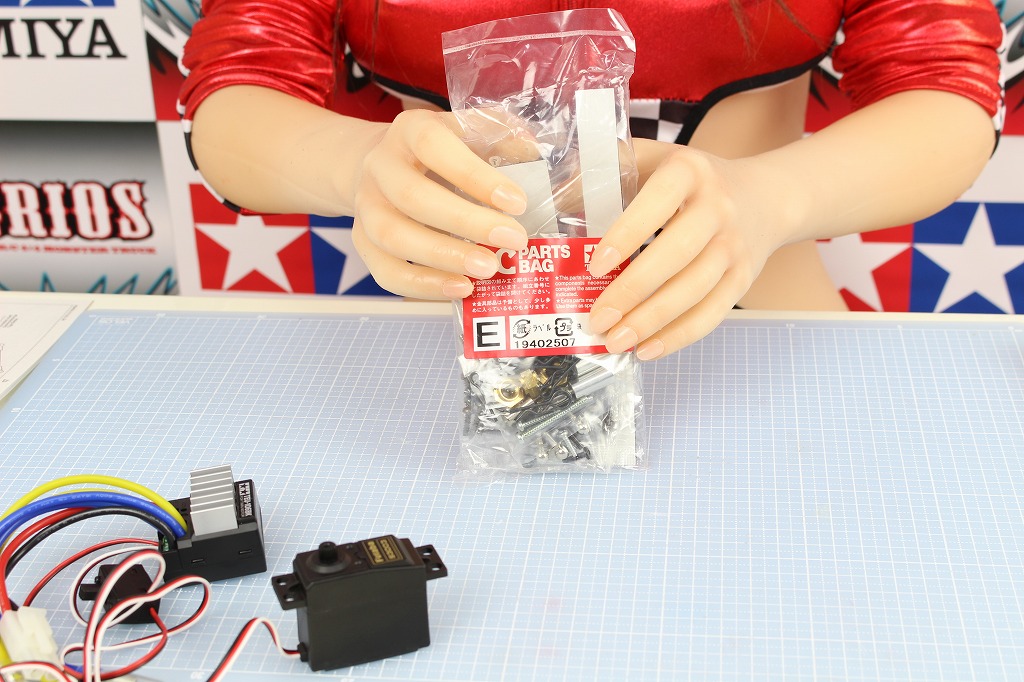
ここから、最後「E」の袋を使います。

中には、両面テープや結束バンド、シャフトなどが入っています。このパーツを全て使い切ったら完成です。

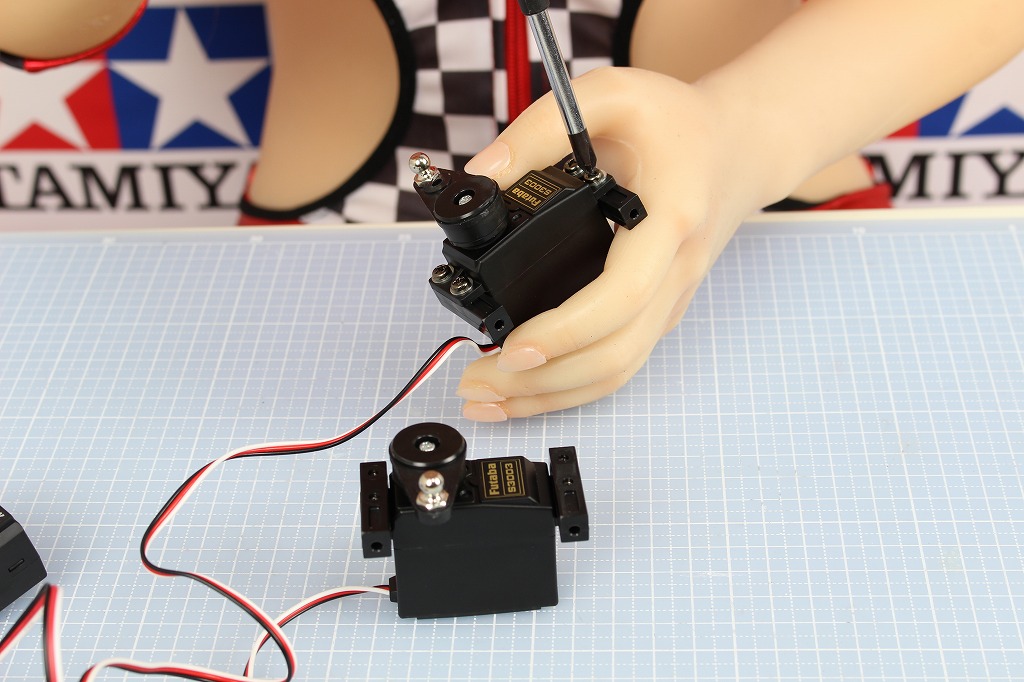
ニュートラルを確認したサーボにパーツを取り付けます。ちなみに、前輪と後輪のサーボでは、取り付けるパーツの向きが異なります。
さらにパーツを取り付けます。
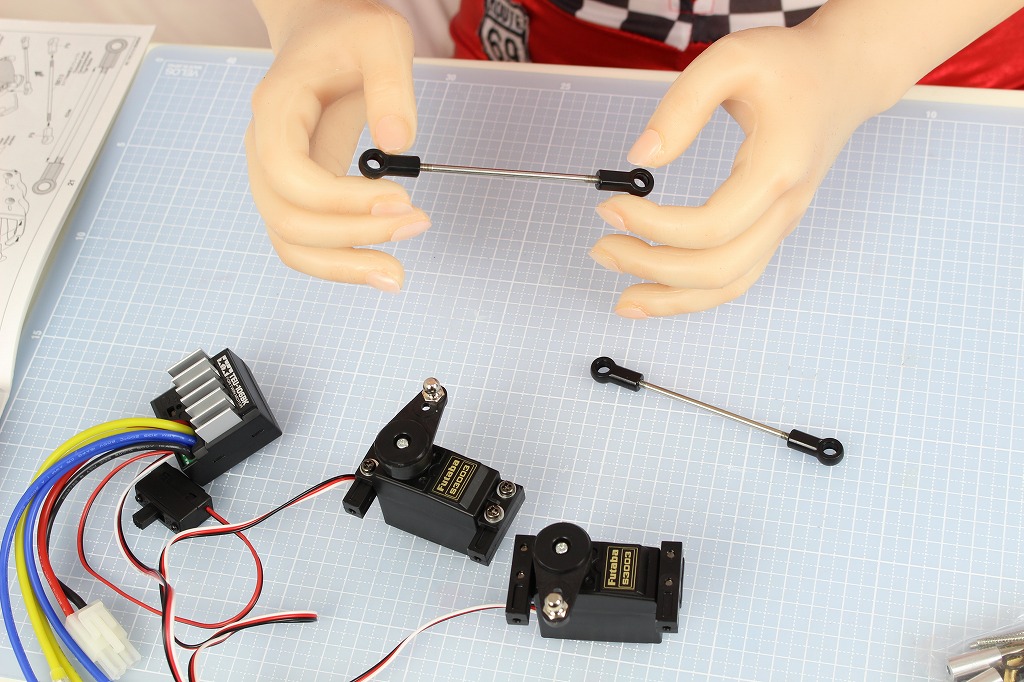
ここで、ロッドを2本組み立てます。ロッドは同じ長さではありません。どちらのサーボに取り付けるかによって、長さが異なります。

サーボにロッドを取り付け、フロントガードとリヤガードにそれぞれ取り付けます。
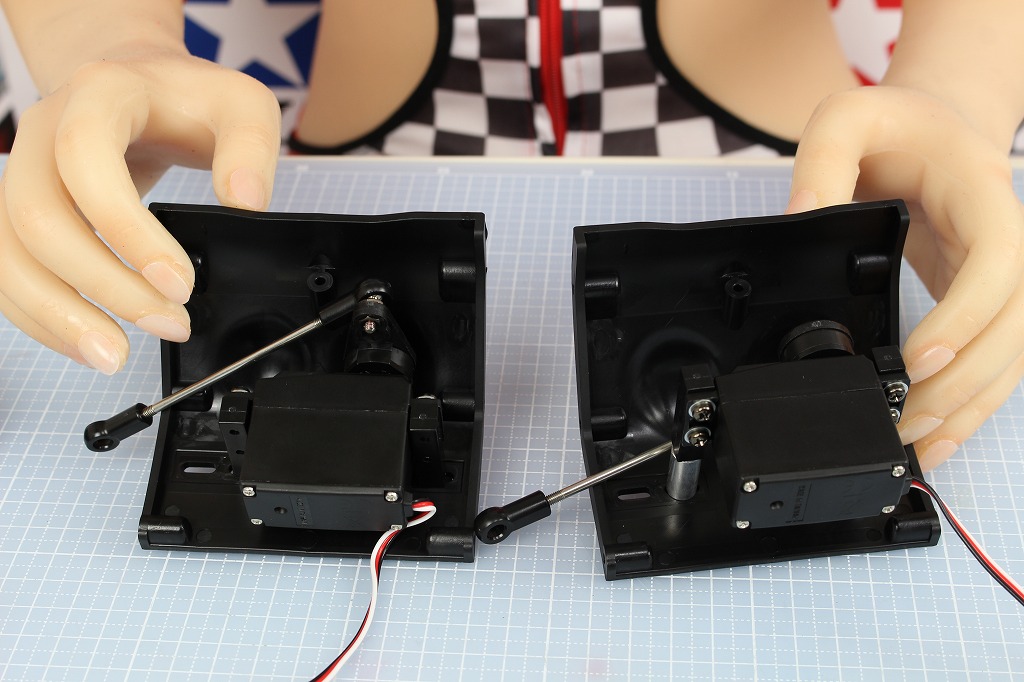
こんな感じです。
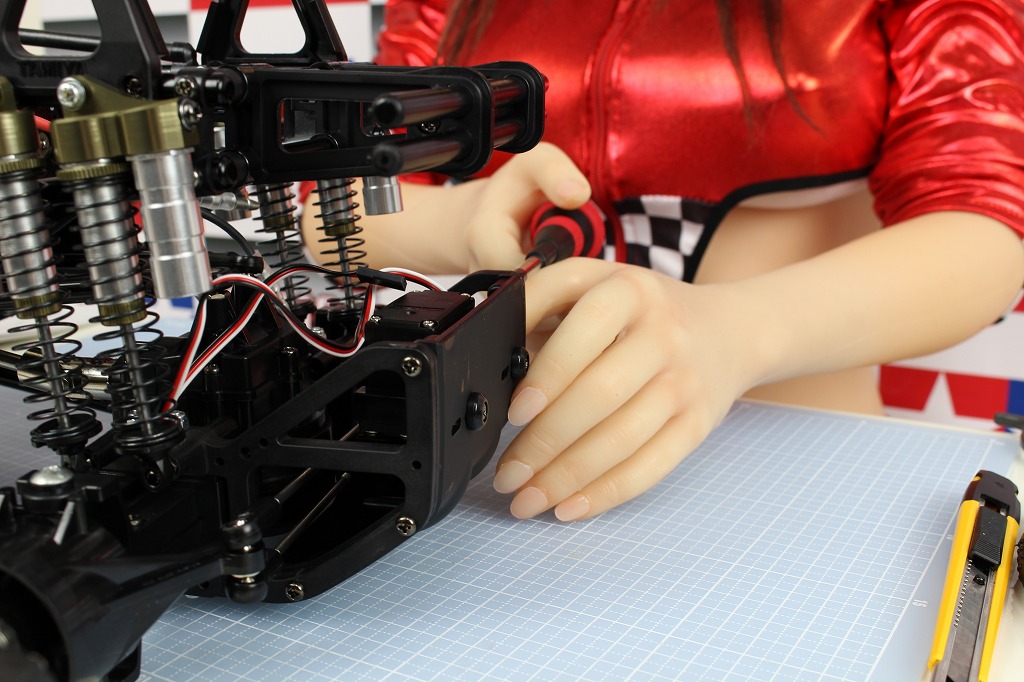
フロントガードを取り付けます。

さらに、リヤガードも取り付けて…

ここまでできました。

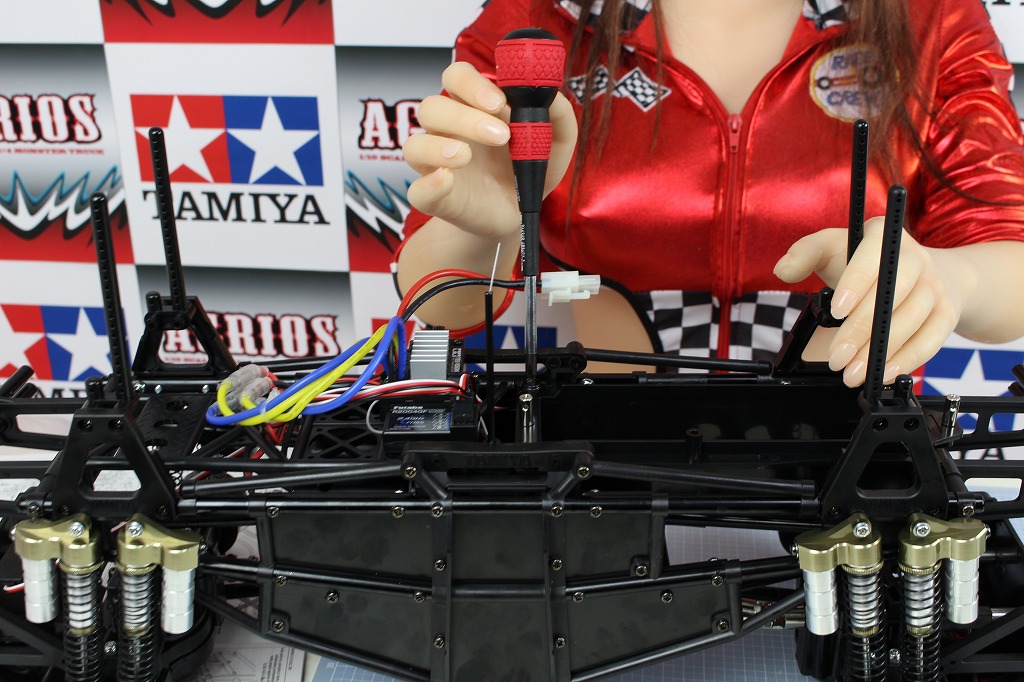
上部にメカデッキを取り付けます。

メカデッキの上に受信機とスピードコントローラーを両面テープで貼り付けます。あと、スイッチも好きなところに両面テープで貼り付けます。
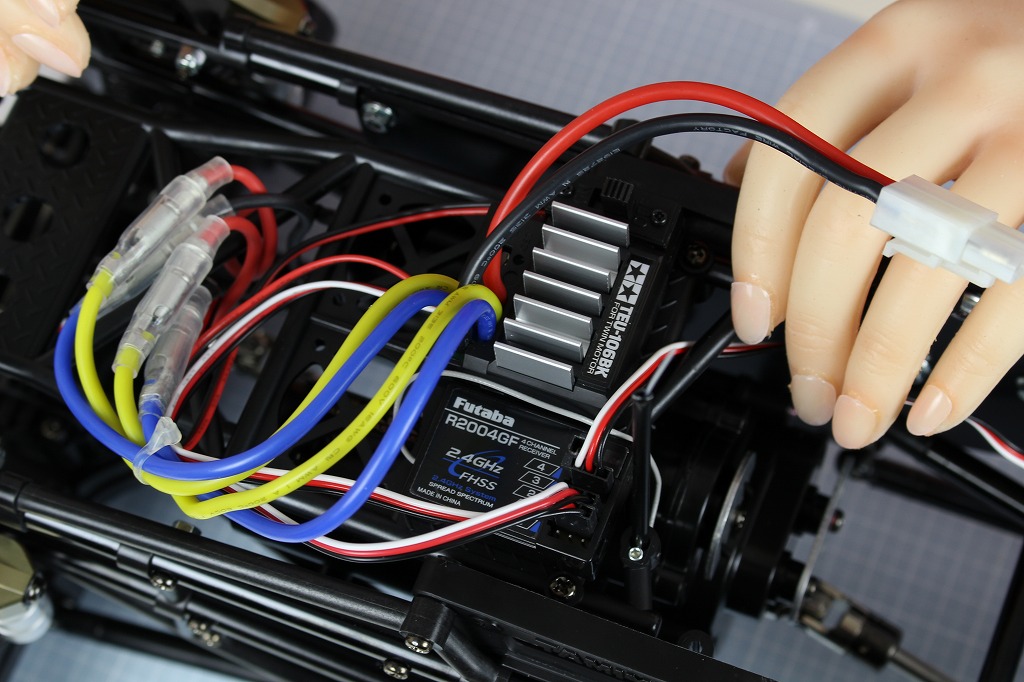
モーターケーブルを接続し、ケーブルをバンドでまとめます。
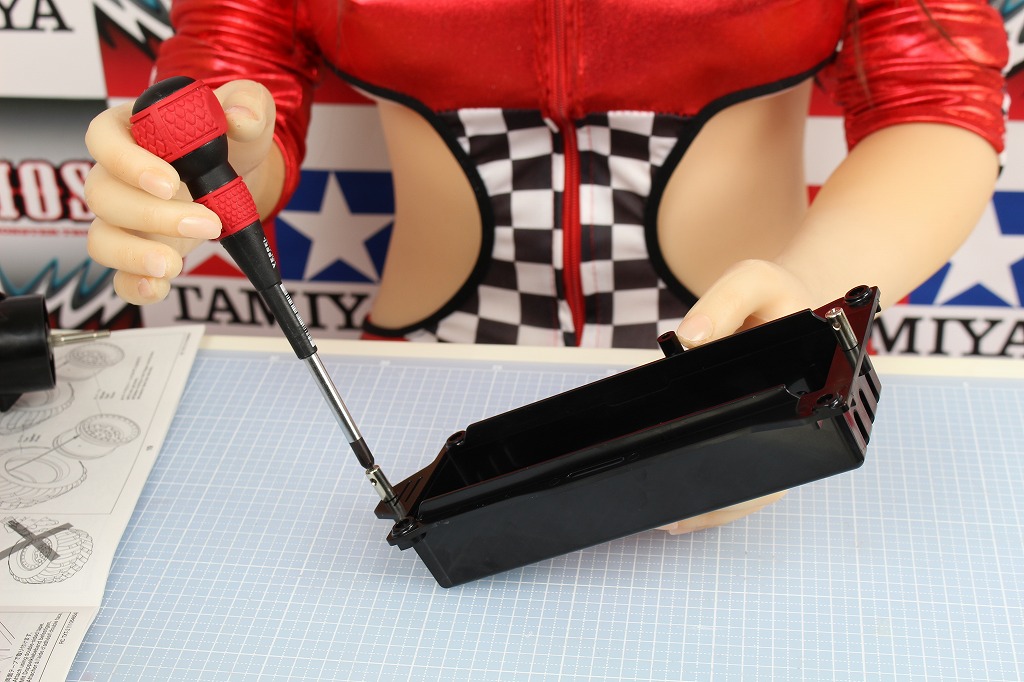
ここで、バッテリーケースを組み立てて…
ボディを固定する棒4本と共に、メカデッキの隣に取り付けます。
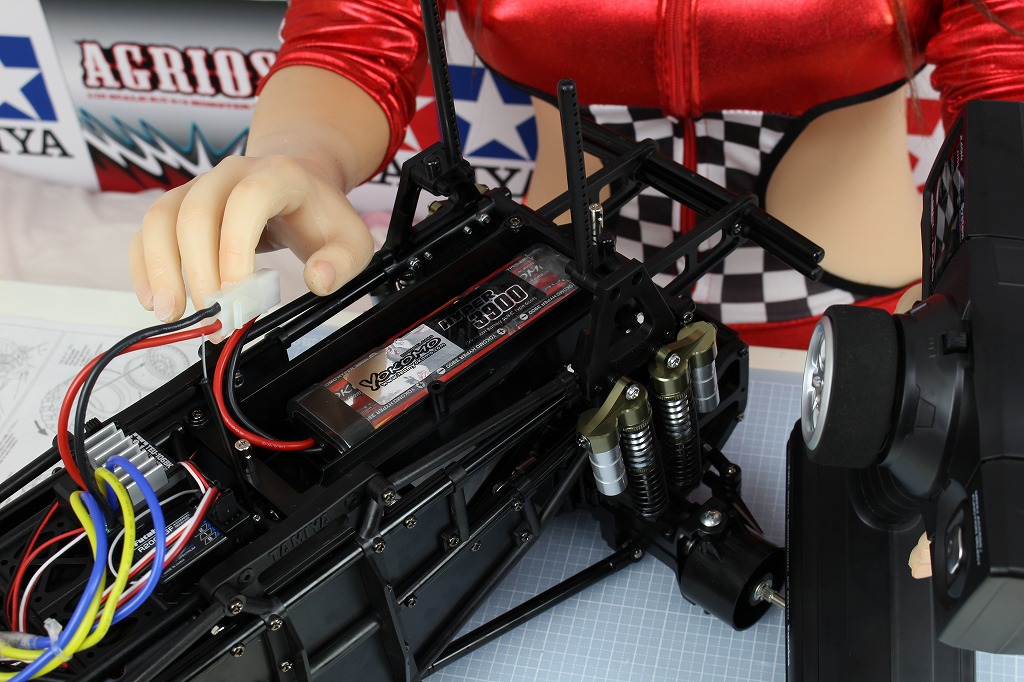
バッテリーを入れ、動作確認をしましょう。

4WSが正しく動作するようにプロポを設定します。

よし、バッチリです。

とりあえず、ツインモーターと4WSが問題なく動作したので一安心です。

ここで、ついに「アレ」の登場です。

そう、タイヤです!

ずっと作りたくて、うずうずしていました…って、汚いタイヤですね。

タイヤの完成です。

ちなみに、ゴムタイヤ用接着剤を使おうと思ったら、マニュアルに接着しないでくださいと書いてあったので、使用しませんでした。

片側にタイヤを取り付けます。

反対側にもタイヤを取り付けます。

バッテリーカバーを付けて…

車体の完成です。
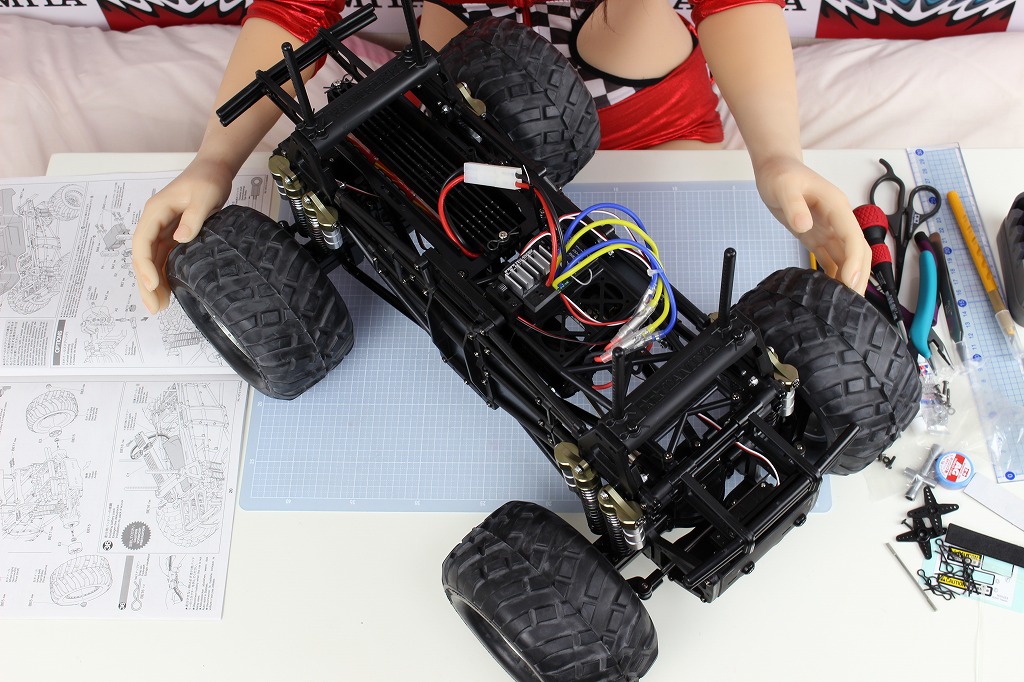
大きすぎて写真に収まりません。

どっちが前か後ろか分かり難いです。

何とかここまできました。次回でラストです。